PLD脉冲激光二极管发射器件 APD雪崩光电二极管光传感器 产品工业应用
无人机简介

无人机工作原理
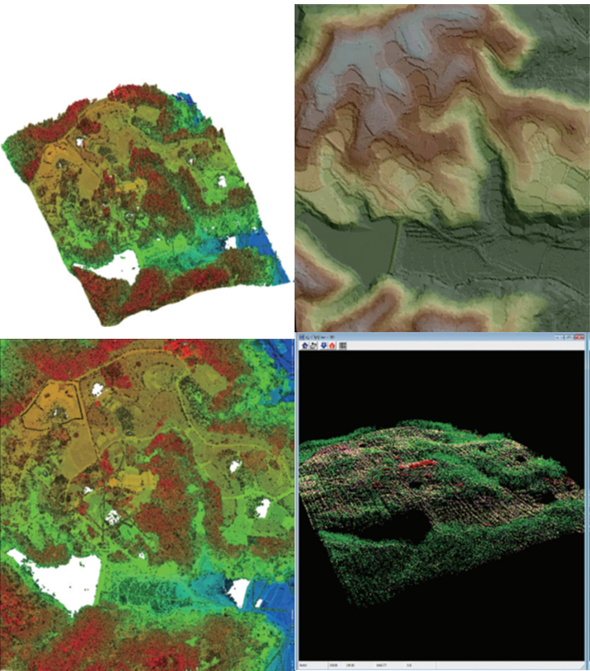
无人机飞行基于TOF测距原理,通过发射激光脉冲,被目标障碍物反射后由探测器接收,计时器记录从发射到接收反射信号的时间差,从而计算出目标障碍物与无人机之间的距离。这种方法具有高精度、快速响应、抗干扰能力强等特点,适用于各种复杂环境下的测距需求,在测高避障、地形测绘、无人机救火以及农林电力巡检等领域得到广泛应用。
TOF激光测距的信号穿透力强,能够在雨、雾、霾等恶劣天气条件下正常工作,且不依赖自然光,因此非常适合无人机在夜间或低光照条件下进行测量。


推荐型号

单结和多结器件,功率高达110W, 5.6mm CD密封封装, 极佳的温度稳定性,,超精密机械公差,完全符合RoHS标准

单结和多结器件,功率高达110W, 5.6mm CD密封封装, 极佳的温度稳定性,,超精密机械公差,完全符合RoHS标准

apd具有0.2 mm2的活动面积 缓慢的增益曲线 QE> 80% @ 750 nm-910 nm 上升时间快,噪音低 最佳增益:50-60

apd具有0.2 mm2的活动面积 缓慢的增益曲线 QE> 80% @ 750 nm-910 nm 上升时间快,噪音低 最佳增益:50-60

apd具有0.2 mm2的活动面积 缓慢的增益曲线 QE> 80% @ 750 nm-910 nm 上升时间快,噪音低 最佳增益:50-60

apd具有0.2 mm2的活动面积 缓慢的增益曲线 QE> 80% @ 750 nm-910 nm 上升时间快,噪音低 最佳增益:50-60

apd具有0.04 mm2的活动面积 缓慢的增益曲线 QE > 80% @ 750 nm-910 nm 上升时间快,噪音低 最佳增益:50-60

apd具有0.2 mm2的活动面积 缓慢的增益曲线 QE> 80% @ 750 nm-910 nm 上升时间快,噪音低 最佳增益:50-60